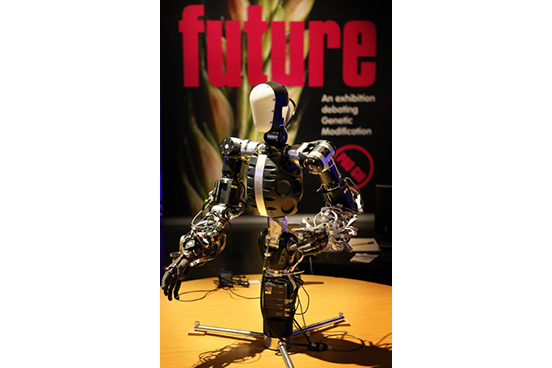
RT2 - Robotic Torso 2

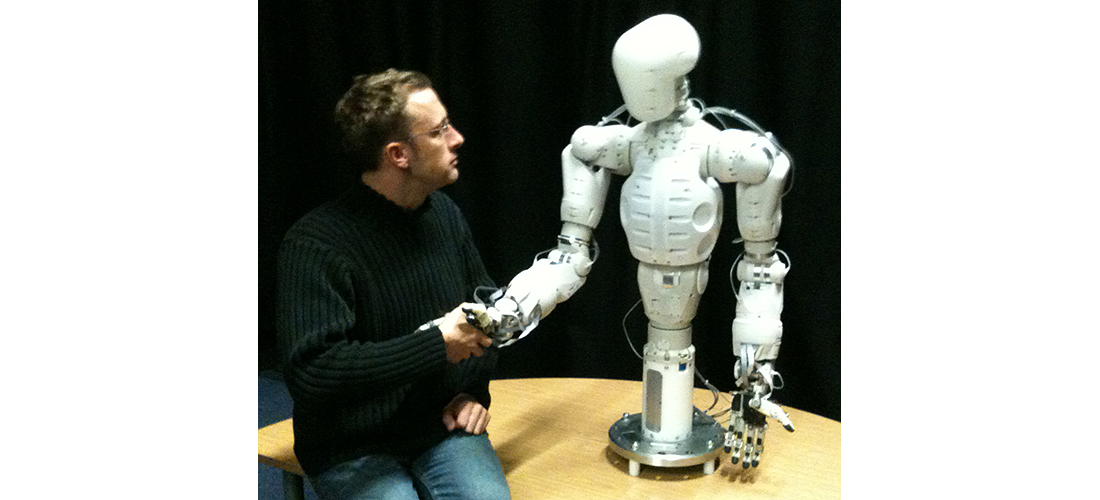
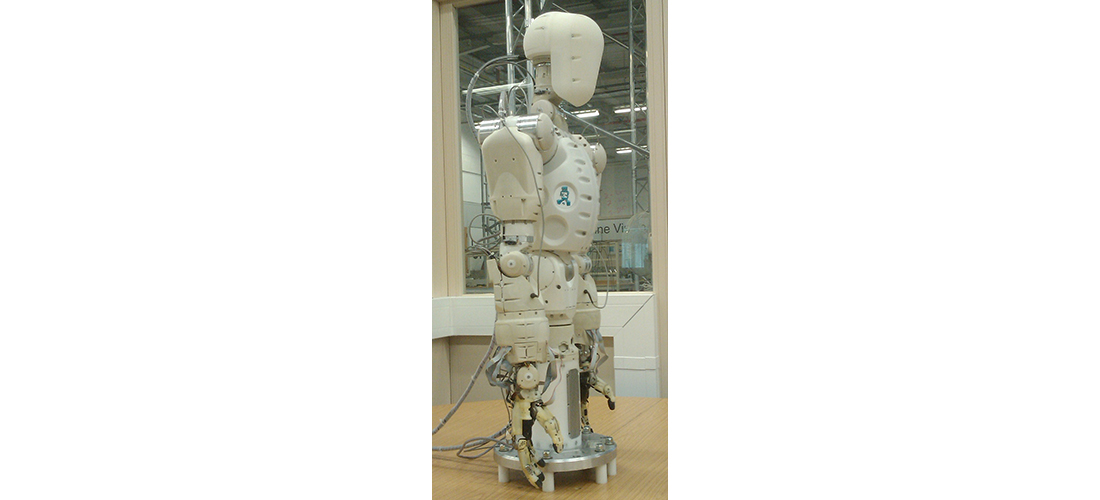
RT2 is the 2nd version of the 36 degree of freedom robotic torso supplementing the core movement capabilities of the torso with novel torque sensors and absolute position sensing on the joints enabling human-robot co-operation experimentation where people were within the robot’s working envelope.
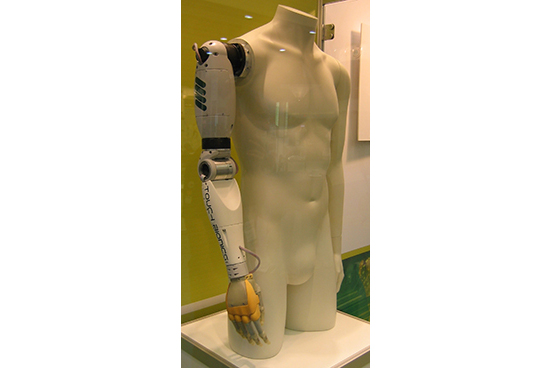
A number of design modifications were implemented in RT2 that were absent from RT1. The arm wiring was rerouted and enclosed in the fairings to eliminate any trailing cables, reducing catching issues and providing the unit with a more visually look.
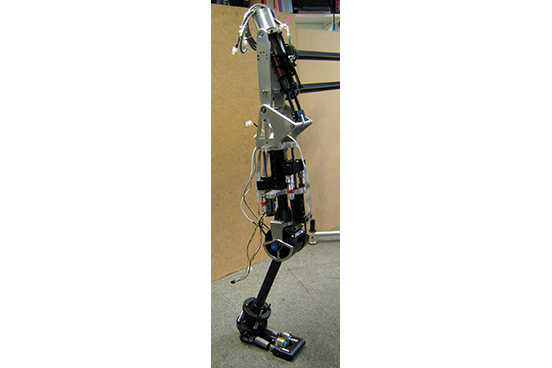
All of the major joints from trunk to elbow included absolute position encoders, providing an extra level of safety if the unit suddenly lost power as it would return to a 'home' position upon reboot.
The major joints also had integrated torque sensing built into them, to help with human robot cooperation